Z축에 대한 회전 공식 (+유도 과정)
directX를 이용해 라이브러리를 개발하던 중
z 축을 기준으로 회전하는 공식을 유도한 과정이다.

이 평면좌표 위의 두 선을

이 위치로 옮겼다 생각하자

좌표 두 개를 각각 (x, y), (x', y')라고 정해주면

알 수 있는 사실은 다음과 같다.
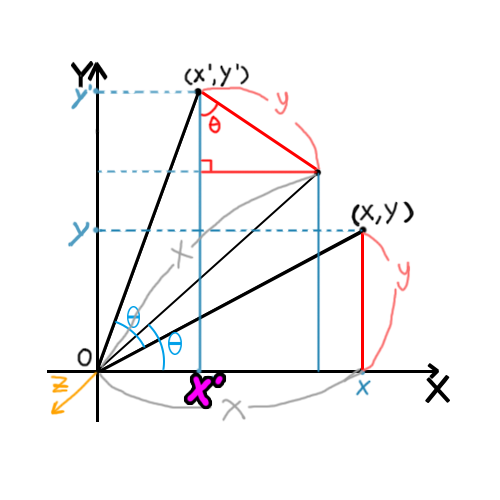
먼저 x'를 구해보자.


x' = xcosθ - ysinθ

y'를 구해보자


y' = xsinθ + ycosθ

구한 식은 행렬로 나타낼 수 있다.
(수학에서의 행렬은 연립방정식을 풀기 위해 사용되지만 cpu graphics에서의 행렬은 변환의 목적으로 쓰인다.)
행렬은 인풋값과 아웃풋 값이 같아야 계산 가능하다.
그렇기에 나는 저 행렬을 3by 3 행렬로 인풋 값에 z값까지 받아오게끔 변형시켰다.
(당연히 아웃풋도 z'까지 나온다.)
[ X' ] [ cosθ -sinθ 0 ] [ x ]
| y | = | sinθ cosθ 0 | | y |
[ z' ] [ 0 0 1 ] [ z ]
이런 식으로,,
참고로 Scale, Translate, Rotation의 각각 행렬을 보면,

이렇게 나타나 지는데 ST행렬은 아래와 같이 표현될 수 있다.

이렇듯 2차원을 translate 하면 3차원이 되고 3dmax 등에서는 3차원에서 한번 더 평행 이동함으로써 4차원 행렬을 사용한다. (4 by 4)
--------------------------------------------------------------------------
Y = TRX와 Y = RTX
두 식은 확연히 다르니 주의해서 구현하도록 하자!